There Not Here Installation
San Francisco — 2018
Augmented reality lets us to blend new worlds with our own. But aside from surface planes and shadows, our physical surroundings are mostly foreign to the experience. Shot and rendered in real-time, the following experiments explore how light, sound and motion from outside of our devices can create multi-dimensional AR experiences that challenge our perspective of "here" and "there."
— AR, interactive, science


Module 01
Light From Non-Objects

Light as an indicator
By definition light is a natural agent that stimulates sight and makes things visible. Synchronizing DMX controllable lights to AR objects, we can observe the presence, speed or proximity of virtual objects on our physical surroundings.
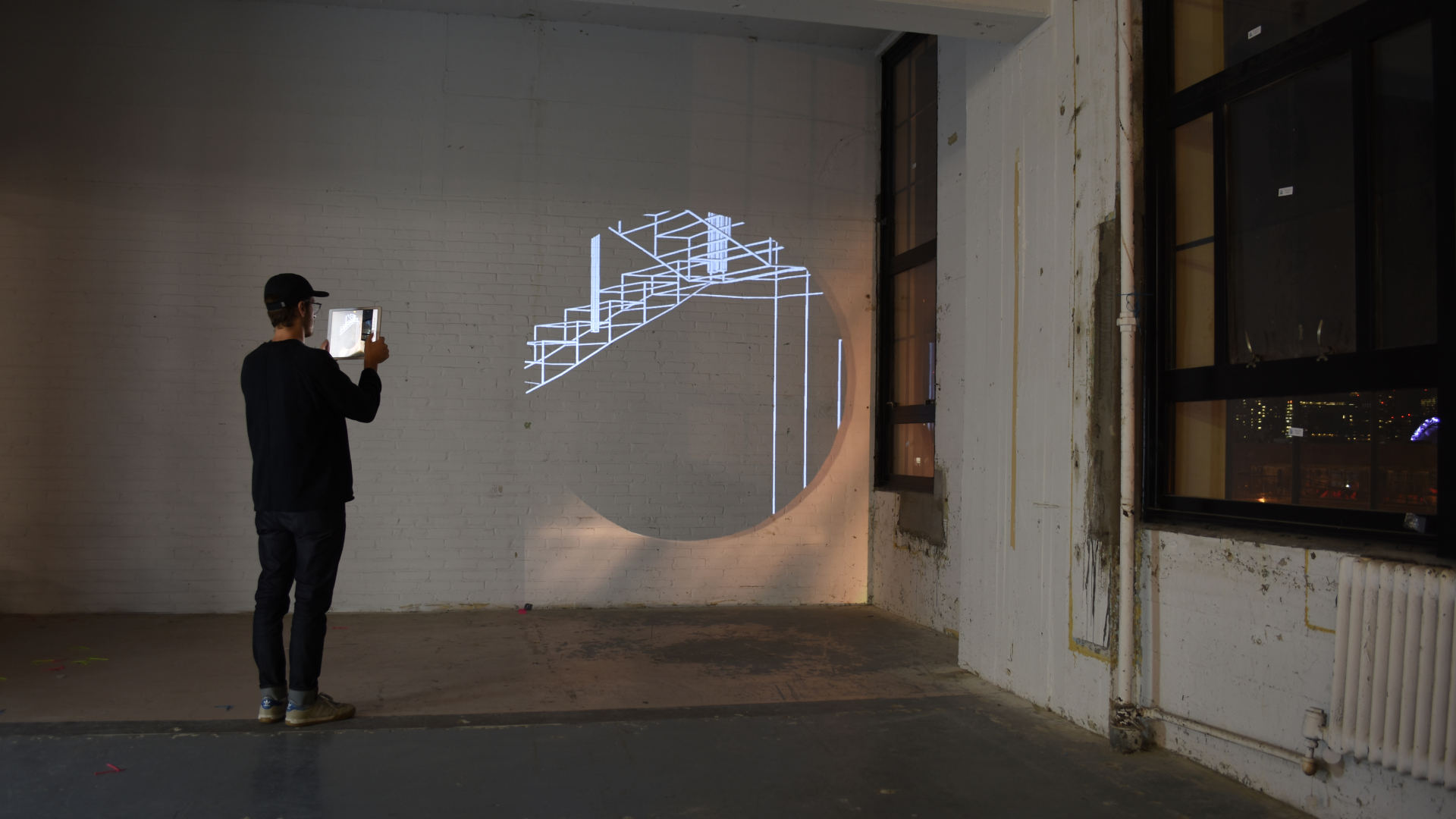
Impossible Projection
With AR, impossible objects can exist among us. In this example, the projected shadow of an AR Tesseract illuminates the ground as a 3D cube.


Module 02
The dichotomy of sound

Sound from non-objects
It's easy to recognize an environmental sound from a speaker. Here, sound created from a drum beater and synchronized to digital objects creates spatial audio cues of virtual objects hitting a physical surface.
Non-objects from sound
In this experiment, we used MIDI to visualize the pressed keys of a piano in real-time. Enlarging those objects at room, or venue scale allows a user view the keys up-close and from their own perspective.



Module 03
Coordinated Motion

Non-object inertia
Game engines have replicated our scientific laws to create realistic simulations of our physical world. In a modern twist on the classic "Newton's Cradle" we tested the boundaries of Newton's first law to see how closely we could translate movement these two worlds.

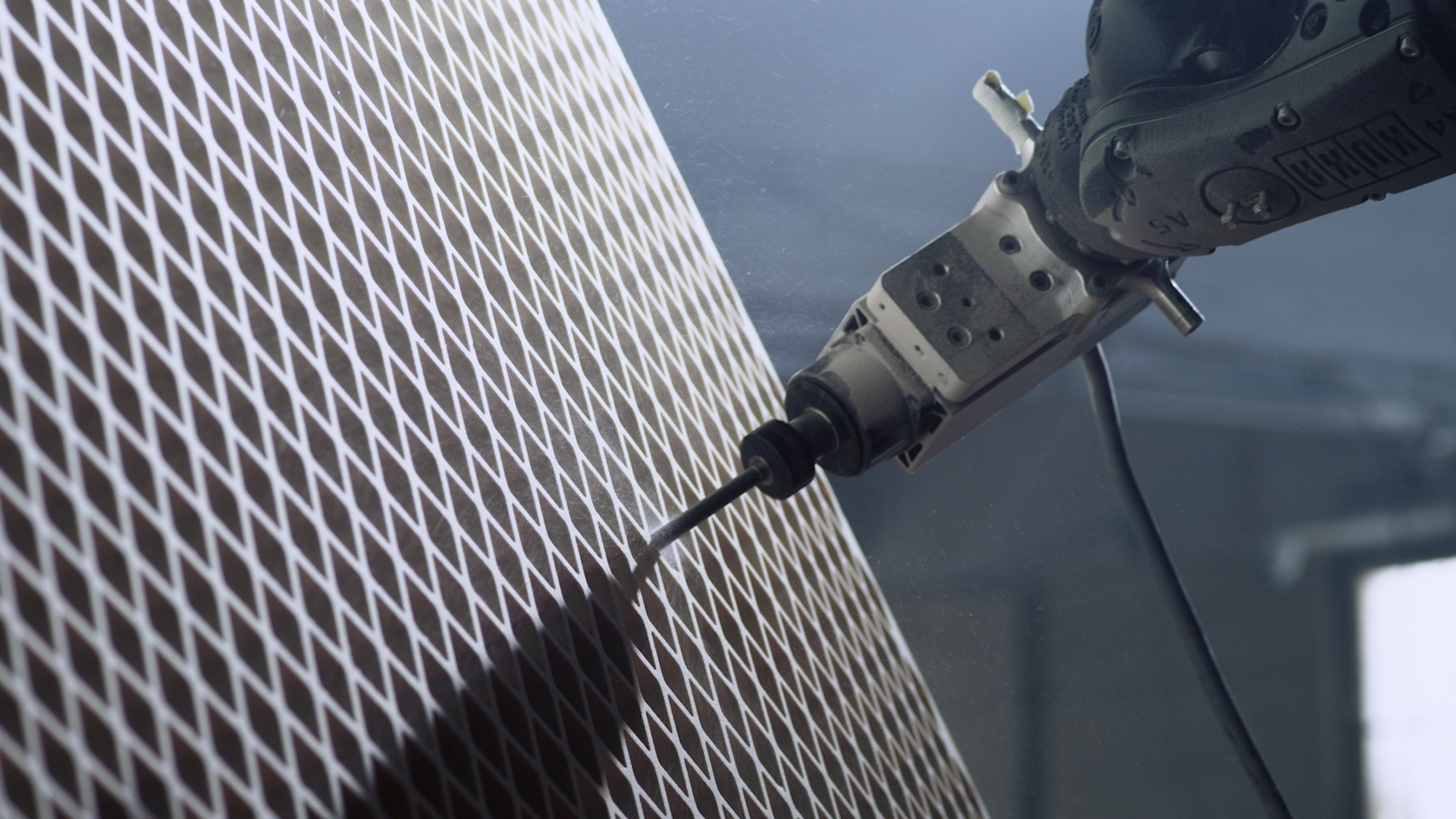
Precision calibration
Robots have the unique ability to "touch" virtual objects based on their 3D spatial awareness. To test the boundaries of this interaction, we built a Unity based real-time controller for our robot arm creating a precise connection between virtual and physical objects in motion.

SCIENCE.AF
Credits
*Work produced at Novel
ECD: Jeff Linnell
Design Team: Jeremy Stewart, Brandon Kruysman, Jonathan Proto
Executive Producer: Julia Gottlieb
Special Thanks - Mimic team at Autodesk: Evan Atherton, Nick Cote, Jason Cuenco
Additional Robotics Support: Eli Reekmans
Video Production: Stebs, Natalie Rhold
Fabrication: Dakota Wilder, Andrew Devansky